 |













| MODEL: | |
|---|---|
| Menge: | |
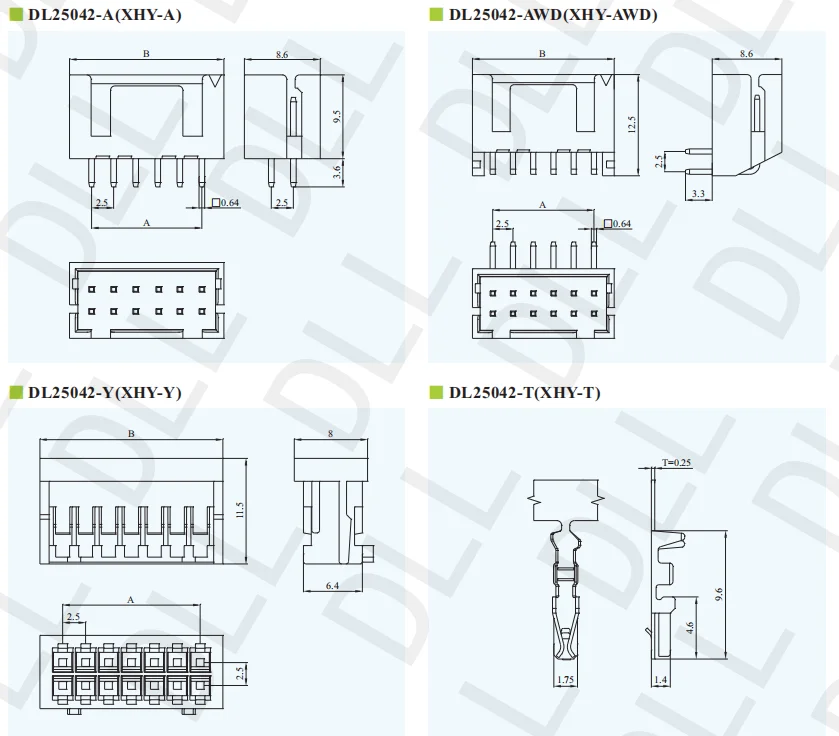
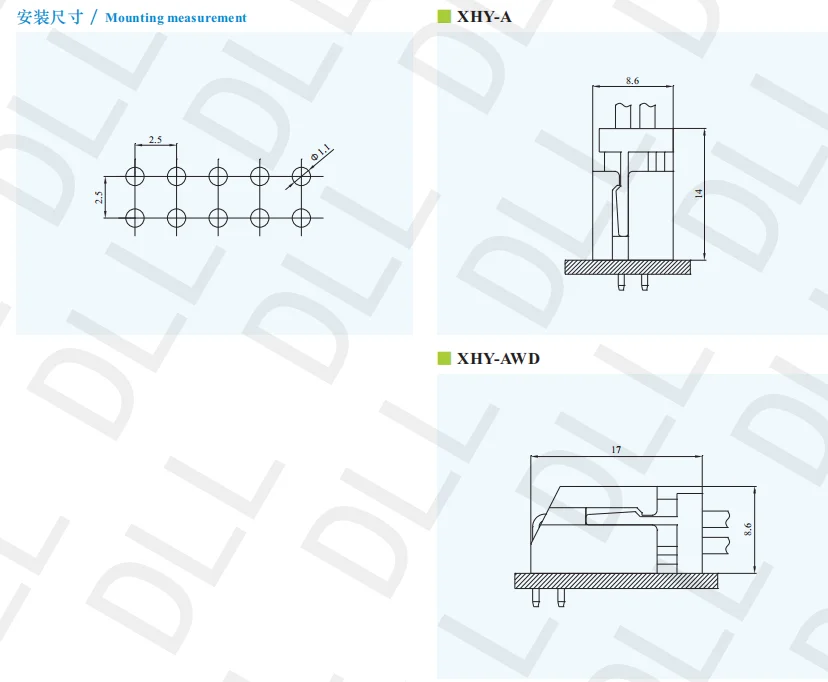
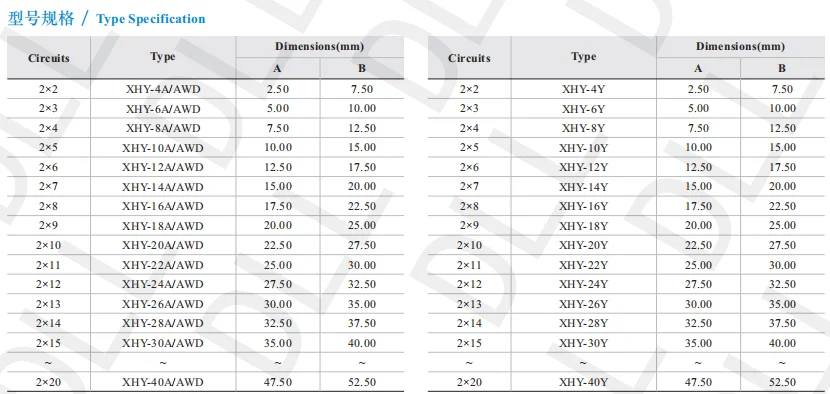
XHY
DLL
SPEZIFIKATION
DELIKATESSEN
ZHEJIANG DELI CONNECTORS CO., LTD
Ersetzen Sie den xhy 2,5-mm-Stiftleistenstecker. Stunden xhy 2,5 mm-Stiftleistenstecker
Nennspannung: | 250 V Wechselstrom, Gleichstrom |
Nennstrom: | 3A Wechselstrom, Gleichstrom |
Kontaktwiderstand: | 30 MΩ max |
Isolationswiderstand: | 1000 MΩ min |
Spannungsfestigkeit: | 650V AC/Minute |
Temperatur: | -25℃~+85℃ |
MATERIAL
DELIKATESSEN
ZHEJIANG DELI CONNECTORS CO., LTD
Gehäuse: | (Nylon) UL94-V0(2) |
Terminal: | Phosphorbronze, verzinnt |
Waffel: | (Nylon) UL94-V0(2) |
Weitere Produkte zur Auswahl:

Anwendung
Robotersteuerungssystem: Im Gelenkantrieb, der Sensorsignalerfassung und dem Steuerungssystem des Roboters kann der gerade Nadelstecker XHY zum Anschluss von Komponenten wie Motoren, Encodern und Kraftsensoren verwendet werden. Beispielsweise wird der Motor über einen geraden Stiftstecker mit der Gelenksteuerung des Roboters verbunden, um eine präzise Bewegungssteuerung der Gelenke zu erreichen; Der Encoder gibt die Positions- und Geschwindigkeitsinformationen des Gelenks über einen geraden Nadelanschluss an das Steuerungssystem zurück und erreicht so eine Regelung im geschlossenen Regelkreis.
SPEZIFIKATION
DELIKATESSEN
ZHEJIANG DELI CONNECTORS CO., LTD
Ersetzen Sie den xhy 2,5-mm-Stiftleistenstecker. Stunden xhy 2,5 mm-Stiftleistenstecker
Nennspannung: | 250 V Wechselstrom, Gleichstrom |
Nennstrom: | 3A Wechselstrom, Gleichstrom |
Kontaktwiderstand: | 30 MΩ max |
Isolationswiderstand: | 1000 MΩ min |
Spannungsfestigkeit: | 650V AC/Minute |
Temperatur: | -25℃~+85℃ |
MATERIAL
DELIKATESSEN
ZHEJIANG DELI CONNECTORS CO., LTD
Gehäuse: | (Nylon) UL94-V0(2) |
Terminal: | Phosphorbronze, verzinnt |
Waffel: | (Nylon) UL94-V0(2) |
Weitere Produkte zur Auswahl:
Anwendung
Robotersteuerungssystem: Im Gelenkantrieb, der Sensorsignalerfassung und dem Steuerungssystem des Roboters kann der gerade Nadelstecker XHY zum Anschluss von Komponenten wie Motoren, Encodern und Kraftsensoren verwendet werden. Beispielsweise wird der Motor über einen geraden Stiftstecker mit der Gelenksteuerung des Roboters verbunden, um eine präzise Bewegungssteuerung der Gelenke zu erreichen; Der Encoder gibt die Positions- und Geschwindigkeitsinformationen des Gelenks über einen geraden Nadelanschluss an das Steuerungssystem zurück und erreicht so eine Regelung im geschlossenen Regelkreis.